
新闻中心
产品中心
联系我们

电话:13316379101
邮箱:1355229533@qq.com
地址:深圳市龙华区民治街道樟坑社区青创城A栋B502
干货——步进电机的三种类型详细介绍
发布时间:2020-12-05 07:53:24
重视控制的电机
一般来说旋转是电机最重要的功能,而停转相对不那么重要。前面介绍的直流电机和之后将要介绍的交流电机,持续旋转是它们的主要功能, 将停止作为一个可控制功能来实现并不容易。需要快速切换旋转 / 停止状态的伺服电 机,多采用闭环控制来实现电流控制、转速控制和位置控制等。实现这种闭环控制功 能,除了需要各种用于反馈的传感器,控制系统的设计和调整也是必不可少的,这会 使整个系统变得更复杂。相对的,步进电机通过非常简单的操作就可以达成一定角度(步进)旋转 / 停止 这个目标。它有时也被称为脉冲电机。无刷电机根据转子永磁体的旋转来同步顺序切换定子线圈的相电流,以达到连续 旋转的目的。如果没有这种同步切换机制,那么转子会随着线圈中的电流旋转一个角 度后直接停止。步进电机利用了这种性质,每次步进一定的旋转角度。步进电机根据输入脉冲每次旋转一定角度(步进角)。旋转角度与输入的脉冲数成比例,转速则与脉冲的频率成比例。通过控制输入信号的脉冲数和频率,可以直接 控制旋转角度和转速。不需要反馈信号传感器,通过简单的开环控制即可控制电机旋 转,所以这种电机的控制系统非常容易构建。驱动步进电机时,需要一个驱动电路来为每个输入脉冲信号切换电机的励磁 线圈。步进电机的特征如下:·需要一个驱动电路来针对每个输入脉冲信号切换电机各相线圈来励磁 ·只根据输入脉冲旋转一定的角度(步进角),因此电机的旋转角度与输入的脉 冲数有关,转速与脉冲频率有关 ·脉冲频率过高或负载转矩过大时,可能会出现失步。
分 类
根据电磁学结构,步进电机大致分为以下三种类型。
·VR(Variable Reluctance,可变磁阻)式电机
·PM(Permanent Magnet,永磁)式电机
·HB(Hybrid Type,混合)式电机
VR 式
这类电机的转子和定子都具有凸极结构。凸极结构会导致气隙磁阻发生变化,从 而产生转矩。因此,它被称为可变磁阻式电机。这类电机不使用永磁体。这是一种相当有历史的古老的结构,现在正在逐渐退出历史舞台,只在一些特殊 场合还有应用,如需要比较大的转矩等。可以说,不使用永磁体是它的一个特点。
PM 式
如图1所示。

图1
这类电机被称为永磁式电机,因为其转子使用了多极磁化的永磁体。它的典型结构如下。线圈骨架包围在转子外面。从轴向看,线圈从上到下都 被冲压金属制成的轭覆盖。在转子外的线圈内侧,上下交替地设置了梳齿状磁极。当电流通过线圈时,上齿和下齿之间就会产生磁场。梳齿按照 S 极、N 极……交 替排列。上述是单相的情况。根据相数,在适当的相位差处上下重合连接,就制成了这种 电机的定子。最后,在这样的定子的中心孔中插入长椭圆形的多极永磁体转子。由于磁极梳齿的形状酷似动物的爪子(鸟兽的爪、蟹和虾的螯等),因此也被称 为爪极。磁轭和磁极部分可以通过冲压制成,线圈可以缠绕在绕线管上,制造成本较低。低成本电机的需求量往往很大,大多数永磁式电机都是低成本电机。这种类型的电机, 两相最为常见,三相也不少见。这种电机的步进角度相对较大,两相的常见角度为 15°和 7.5°,而三相的以 3.75°更常见。
HB 式
如图 2 所示。

图2
要减小 VR 或 PM 式步进电机的步进角,就要增加转子和定子 的齿数和极数。而增加 VR 电机的定子齿数无疑会使线圈变复杂。此外,在爪极电机 中,转子的磁极数和定子的齿数有一定限度。
HB 式电机不通过磁化实现多极化, 而是将永磁体沿轴向方向磁化为 N 极、S 极, 在其外侧夹上外周有小齿的转子铁心,制成 N 极、S 极沿轴向交替排列的多极转子。定子则在不增加线圈磁极数量的情况下,在磁极靴部设置小齿。通过转子和定子上的 这些齿实现高分辨率、高步进角精度。可以说它是 VR 和 PM 式的组 合结构,因此被称为复合式。图 3 是它的转子和定子的外观。
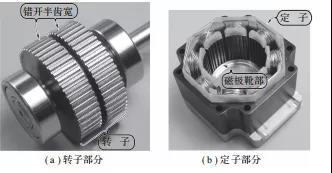
图3
磁极小齿的精确加工,一般采用硅钢片叠层工艺。HB 式步进电机适用于要求高分辨率和高精度的应用。其两相的步进角标准值为 1.8°。另外,还有两相 0.9°,三相 0.6°、1.2°、3.75°,五相 0.72°等规格。
RM 式
这种步进电机,在结构上用圆柱形磁体代替 HB 式步进电机的转子。磁体上设 置有与 HB 式转子齿数相当的极对数(S 和 N 极)的磁极。虽然它采用永磁体作为转 子,但也可以被认为是一种 PM 式电机。为了区分它与普通的 PM 式电机,一般称其 为 RM(Ring-permanent Magnet,环形永磁)[7] 式电机。因为转子上没有齿,气隙的磁通分布接近于正弦波,因此它具有振动小、噪声低 的优点,在微步驱动时的步进角精度也很高。但是,由于难以形成 高分辨率的交互磁极,所以它的基本步进角大于 HB 式电机。现在,具有 32 极(极对数 16)的转子,基本步进角为 3.75°的 RM 式三相步进 电机已经商品化了。它的外观与 HB 式电机几乎完全相同。
实际应用中的注意事项
通过控制输入信号的脉冲数和频率可以直接控制旋转角度和转速。不需要反馈信 号传感器,可以直接进行开环控制。出于这个特点,利用它构建控制系统非常容易, 因此它被广泛用于简单的位置控制。特别是使用微控制器的各种系统,如移动机器人,只需将微控制器产生的脉冲指 令输入到电机驱动部分,就可以轻松地控制电机移动目标距离。
一般来说旋转是电机最重要的功能,而停转相对不那么重要。前面介绍的直流电机和之后将要介绍的交流电机,持续旋转是它们的主要功能, 将停止作为一个可控制功能来实现并不容易。需要快速切换旋转 / 停止状态的伺服电 机,多采用闭环控制来实现电流控制、转速控制和位置控制等。实现这种闭环控制功 能,除了需要各种用于反馈的传感器,控制系统的设计和调整也是必不可少的,这会 使整个系统变得更复杂。相对的,步进电机通过非常简单的操作就可以达成一定角度(步进)旋转 / 停止 这个目标。它有时也被称为脉冲电机。无刷电机根据转子永磁体的旋转来同步顺序切换定子线圈的相电流,以达到连续 旋转的目的。如果没有这种同步切换机制,那么转子会随着线圈中的电流旋转一个角 度后直接停止。步进电机利用了这种性质,每次步进一定的旋转角度。步进电机根据输入脉冲每次旋转一定角度(步进角)。旋转角度与输入的脉冲数成比例,转速则与脉冲的频率成比例。通过控制输入信号的脉冲数和频率,可以直接 控制旋转角度和转速。不需要反馈信号传感器,通过简单的开环控制即可控制电机旋 转,所以这种电机的控制系统非常容易构建。驱动步进电机时,需要一个驱动电路来为每个输入脉冲信号切换电机的励磁 线圈。步进电机的特征如下:·需要一个驱动电路来针对每个输入脉冲信号切换电机各相线圈来励磁 ·只根据输入脉冲旋转一定的角度(步进角),因此电机的旋转角度与输入的脉 冲数有关,转速与脉冲频率有关 ·脉冲频率过高或负载转矩过大时,可能会出现失步。
分 类
根据电磁学结构,步进电机大致分为以下三种类型。
·VR(Variable Reluctance,可变磁阻)式电机
·PM(Permanent Magnet,永磁)式电机
·HB(Hybrid Type,混合)式电机
VR 式
这类电机的转子和定子都具有凸极结构。凸极结构会导致气隙磁阻发生变化,从 而产生转矩。因此,它被称为可变磁阻式电机。这类电机不使用永磁体。这是一种相当有历史的古老的结构,现在正在逐渐退出历史舞台,只在一些特殊 场合还有应用,如需要比较大的转矩等。可以说,不使用永磁体是它的一个特点。
PM 式
如图1所示。

图1
这类电机被称为永磁式电机,因为其转子使用了多极磁化的永磁体。它的典型结构如下。线圈骨架包围在转子外面。从轴向看,线圈从上到下都 被冲压金属制成的轭覆盖。在转子外的线圈内侧,上下交替地设置了梳齿状磁极。当电流通过线圈时,上齿和下齿之间就会产生磁场。梳齿按照 S 极、N 极……交 替排列。上述是单相的情况。根据相数,在适当的相位差处上下重合连接,就制成了这种 电机的定子。最后,在这样的定子的中心孔中插入长椭圆形的多极永磁体转子。由于磁极梳齿的形状酷似动物的爪子(鸟兽的爪、蟹和虾的螯等),因此也被称 为爪极。磁轭和磁极部分可以通过冲压制成,线圈可以缠绕在绕线管上,制造成本较低。低成本电机的需求量往往很大,大多数永磁式电机都是低成本电机。这种类型的电机, 两相最为常见,三相也不少见。这种电机的步进角度相对较大,两相的常见角度为 15°和 7.5°,而三相的以 3.75°更常见。
HB 式
如图 2 所示。

图2
要减小 VR 或 PM 式步进电机的步进角,就要增加转子和定子 的齿数和极数。而增加 VR 电机的定子齿数无疑会使线圈变复杂。此外,在爪极电机 中,转子的磁极数和定子的齿数有一定限度。
HB 式电机不通过磁化实现多极化, 而是将永磁体沿轴向方向磁化为 N 极、S 极, 在其外侧夹上外周有小齿的转子铁心,制成 N 极、S 极沿轴向交替排列的多极转子。定子则在不增加线圈磁极数量的情况下,在磁极靴部设置小齿。通过转子和定子上的 这些齿实现高分辨率、高步进角精度。可以说它是 VR 和 PM 式的组 合结构,因此被称为复合式。图 3 是它的转子和定子的外观。

图3
磁极小齿的精确加工,一般采用硅钢片叠层工艺。HB 式步进电机适用于要求高分辨率和高精度的应用。其两相的步进角标准值为 1.8°。另外,还有两相 0.9°,三相 0.6°、1.2°、3.75°,五相 0.72°等规格。
RM 式
这种步进电机,在结构上用圆柱形磁体代替 HB 式步进电机的转子。磁体上设 置有与 HB 式转子齿数相当的极对数(S 和 N 极)的磁极。虽然它采用永磁体作为转 子,但也可以被认为是一种 PM 式电机。为了区分它与普通的 PM 式电机,一般称其 为 RM(Ring-permanent Magnet,环形永磁)[7] 式电机。因为转子上没有齿,气隙的磁通分布接近于正弦波,因此它具有振动小、噪声低 的优点,在微步驱动时的步进角精度也很高。但是,由于难以形成 高分辨率的交互磁极,所以它的基本步进角大于 HB 式电机。现在,具有 32 极(极对数 16)的转子,基本步进角为 3.75°的 RM 式三相步进 电机已经商品化了。它的外观与 HB 式电机几乎完全相同。
实际应用中的注意事项
通过控制输入信号的脉冲数和频率可以直接控制旋转角度和转速。不需要反馈信 号传感器,可以直接进行开环控制。出于这个特点,利用它构建控制系统非常容易, 因此它被广泛用于简单的位置控制。特别是使用微控制器的各种系统,如移动机器人,只需将微控制器产生的脉冲指 令输入到电机驱动部分,就可以轻松地控制电机移动目标距离。
- 上一篇:步进电机的动态特性和静态特性!
- 下一篇:三相HB步进电机工作原理及接线图
产品推荐:两相步进电机





产品推荐:无刷电机








产品推荐:两相步进驱动器








产品推荐:直流无刷驱动器






 地址 ADDRESS
地址 ADDRESS
