
新闻中心
产品中心
联系我们

电话:13316379101
邮箱:1355229533@qq.com
地址:深圳市龙华区民治街道樟坑社区青创城A栋B502
步进电动机的闭环伺服控制说明
发布时间:2020-09-11 08:23:26
开环驱动的
步进电机系统成本低,定位精度较高,低速输出力矩大,掉电时有定位力矩,但也有一些不足。开环控制使系统存在振荡区,在使用时必须避开振荡点,否则速度波动很大,严重时可能导致失步。同时,起动受到限制。一般要通过控制外加的速度给定按一定的升速规律实现起动,必须有足够长的升速过程。这导致它在速度变化率较大的场合的使用受到了限制。另外,抗负载波动的能力较差。如果负载出现冲击转矩,电机可能失步或堵转。所以一般不能满载运行,必须留有足够的余量。这导致电机的容量得不到充分应用。开环控制一般无法实现有效的功角控制,定子电流中有很大的无功电流成分,驱动电流过大,加大了电机的损耗,所以它的效率一般较低。
随着工业应用的不断深入和相关技术的发展,人们对 步进电动机应用系统提出了越来越高的性能要求。闭环伺服控制运行方式从根本上解决了震荡和失步问题,实现了绕组电流的有效控制,提高了效率,拓宽了步进电动机运动控制系统的应用领域。图1给出了一种步进电动机矢量控制位置伺服系统的结构框图。
该系统采用神经网络模型参考自图1步进电动机矢量控制位置伺服系统框图适应控制对系统中的不确定因素进行实时补偿,通过最大转矩/电流矢量控制实现电机高效控制。步进电动机闭环伺服控制通常采用高性能的DSP芯片作为控制器,图2给出了一种步进电动机闭环伺服系统的硬件构成示意图。

随着工业应用的不断深入和相关技术的发展,人们对 步进电动机应用系统提出了越来越高的性能要求。闭环伺服控制运行方式从根本上解决了震荡和失步问题,实现了绕组电流的有效控制,提高了效率,拓宽了步进电动机运动控制系统的应用领域。图1给出了一种步进电动机矢量控制位置伺服系统的结构框图。
该系统采用神经网络模型参考自图1步进电动机矢量控制位置伺服系统框图适应控制对系统中的不确定因素进行实时补偿,通过最大转矩/电流矢量控制实现电机高效控制。步进电动机闭环伺服控制通常采用高性能的DSP芯片作为控制器,图2给出了一种步进电动机闭环伺服系统的硬件构成示意图。

图1 步进电动机矢量控制位置伺服系统框图
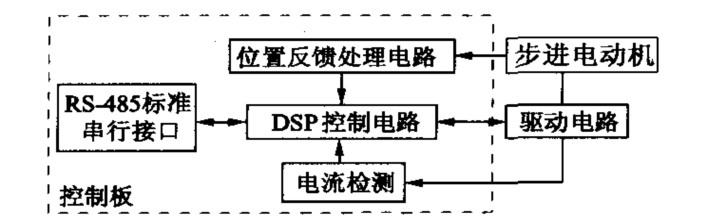

图2 系统硬件结构表示意思图
- 上一篇:步进电动机的类型与内部构造图介绍
- 下一篇:深圳东么川国庆节中秋节放假通知!
产品推荐:两相步进电机





产品推荐:无刷电机








产品推荐:两相步进驱动器








产品推荐:直流无刷驱动器






 地址 ADDRESS
地址 ADDRESS
