
产品中心
联系我们

电话:13316379101
邮箱:1355229533@qq.com
地址:深圳市龙华区民治街道樟坑社区青创城A栋B502
步进电机大致分为以下三种类型
发布时间:2020-07-24 07:46:58
十分重视操纵的电机一般状况下旋转是电机最重要的特性,而转停相对性不那麼关键。前边详细介绍的直流无刷电机和以后即将详细介绍的交流电动机,不断旋转是他们的关键特性,将终止做为一个可操纵特性来完成并不易。必须迅速转换旋转/终止情况的交流伺服电机,多选用闭环控制系统来完成电流量操纵、转速比操纵和部位操纵等。完成这类闭环控制系统特性,除开必须各种各样用以意见反馈的感应器,自动控制系统的设计方案和调节也是不可或缺的,这会使全部系统软件越来越更繁杂。相对性的,步进电机根据比较简单的实际操作就可以达到一定视角(步进)旋转/终止这一总体目标。它有时候也被称作单脉冲电机。直流无刷电机依据转子永磁材料的旋转来同歩次序转换定子电磁线圈的相电压,以做到持续旋转的目地。要是没有这类同歩转换体制,那麼转子会伴随着电磁线圈中的电流量旋转一个视角后立即终止。步进电机运用了这类特性,每一次步进一定的旋转视角。步进电机依据脉冲信号每一次旋转一定视角(步进角)。旋转视角与键入的脉冲数成占比,转速比则与单脉冲的頻率成占比。根据操纵键入数据信号的脉冲数和頻率,能够立即操纵旋转视角和转速比。不用意见反馈数据信号感应器,根据简易的开环控制就可以操纵电机旋转,因此 这类电机的自动控制系统很容易搭建。驱动器步进电机时,必须一个光耦电路来为每一个脉冲信号数据信号转换电机的励磁线圈。步进电机的特点以下:·必须一个光耦电路来对于每一个脉冲信号数据信号转换电机各相电磁线圈来励磁调节器·只依据脉冲信号旋转一定的视角(步进角),因而电机的旋转视角与键入的脉冲数相关,转速比与单脉冲頻率相关·单脉冲頻率过高或负荷转距过大时,很有可能会出現失步归类依据电磁动力构造,步进电机大概分成下列三种种类。
·VR(VariableReluctance,可变性磁电式)
·PM(PermanentMagnet,永磁)
·HB(HybridType,混和)式VR式这种电机的转子和定子都具备凸极构造。凸极构造会造成磁密磁电式产生变化,进而造成转距。因而,它被称作可变性磁电式式电机。这类电机不应用永磁材料。它是一种非常有历史时间的历史悠久的构造,如今已经慢慢撤出历史的舞台,只在一些独特场所也有运用,如必须较为大的转距等。可以说,不应用永磁材料是它的一个特性。PM式如图所示1所显示。
图1


这类电机被称作永磁式电机,由于其转子应用了多极被磁化的永磁材料。它的典型性构造以下。线圈骨架包围着在转子外边。从径向看,电磁线圈从上向下都被冲压模具金属材料做成的轭遮盖。在转子外的电磁线圈里侧,左右更替地设定了驱动链状磁极。当电流量根据电磁线圈时,上齿和下齿中间便会造成电磁场。驱动链依照S极、N极……更替排序。所述是单相电的状况。依据相数,在适度的相位差处左右重叠联接,就做成了这类电机的定子。最终,在那样的定子的管理中心孔内插进长椭圆型的多极永磁材料转子。因为磁极驱动链的样子神似小动物的前爪(禽鸟的爪、蟹和虾的螯等),因而也被称作爪极。磁轭和磁极一部分能够根据冲压模具做成,电磁线圈能够盘绕在缠线管上,制造成本较低。成本低电机的需要量通常非常大,大部分永磁式电机全是成本低电机。这类种类的电机,两相更为普遍,三相也许多 见。这类电机的步进视角相对性很大,二相的普遍视角为15°和7.5°,而三相的以3.75°更普遍。
微信小程序HB式如图2所显示。
图2


要减少VR或PM式步进电机的步进角,就需要提升转子和定子的齿数和极少数。而提升VR电机的定子齿数毫无疑问会使电磁线圈变繁杂。除此之外,在爪极电机中,转子的磁极数和定子的齿数有一定程度。
HB式电机不通过被磁化完成多极化,只是将永磁材料沿径向方位被磁化为N极、S极,在其两侧夹上颈静脉有小齿的转子铁芯,做成N极、S极沿径向更替排序的多极转子。定子则不在提升电磁线圈磁极总数的状况下,在磁极靴部设定小齿。根据转子和定子上的这种齿完成高像素、高步进角精密度。可以说它是VR和PM式的组成构造,因而被称作复合型。图3是它的转子和定子的外型。
图3
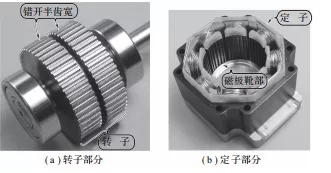

磁极小齿的精准生产加工,一般选用铁氧体磁芯层叠加工工艺。HB式步进电机适用规定高像素和高精密的运用。其二相的步进角指标值为1.8°。此外,也有两相0.9°,三相0.6°、1.2°、3.75°,五相0.72°等规格型号。RM式这类步进电机,结构类型用圆柱型磁场替代HB式步进电机的转子。磁场上设定有与HB式转子齿数非常的极多数(S和N极)的磁极。尽管它选用永磁材料做为转子,但还可以被觉得是一种PM式电机。以便区别它与一般的PM式电机,一般称其为RM(Ring-permanentMagnet,环状永磁)[7]式电机。由于转子上沒有齿,磁密的磁通量遍布贴近于正弦波形,因而它具备震动小、噪音低的优势,在微步驱动器时的步进角精密度也很高。可是,因为无法产生高像素的互动磁极,因此 它的基础步进角超过HB式电机。如今,具备32极(极多数16)的转子,基础步进夹角3.75°的RM式三相步进电机早已商业化了。它的外型与HB式电机基本上完全一致。具体运用中的常见问题根据操纵键入数据信号的脉冲数和頻率能够立即操纵旋转视角和转速比。不用意见反馈数据信号感应器,能够立即开展开环控制。出自于这一特性,运用它搭建自动控制系统很容易,因而它被普遍用以简易的部位操纵。非常是应用微处理器的各种各样系统软件,如搬运机器人,只需将微处理器造成的单脉冲命令键入到电机驱动器一部分,就可以轻轻松松地操纵电机挪动总体目标间距。
- 上一篇:步进电机驱动器详细资料说明
- 下一篇:混合式步进电机振动,试试这几个方法
产品推荐:两相步进电机





产品推荐:无刷电机








产品推荐:两相步进驱动器








产品推荐:直流无刷驱动器






 地址 ADDRESS
地址 ADDRESS
